脉冲到底是个啥东西?步进电机一直说发脉冲
步进电机通过接收脉冲信号来实现精确的位置控制。脉冲是一种短暂的电信号,它的变化可以触发步进电机转动一定的角度或步进。步进电机控制系统会根据输入的脉冲信号来精确定位和控制步进电机的转动,每个脉冲信号通常对应步进电机转动的一个固定的步进角度。
简单来说,当步进电机需要转动时,控制系统会发送一系列脉冲信号给步进电机,每个脉冲信号对应步进电机转动的一个步进角度。通过控制脉冲信号的频率和数量,可以精确地控制步进电机的转动,从而实现精准的位置控制和运动控制。
步进电机的相数是干嘛的,比如;两相是啥意思
步进电机的相数指的是步进电机的驱动方式中使用的线圈数量。常见的步进电机有两相、三相、四相和五相等不同的相数。
在两相步进电机中,驱动方式包含两个线圈(也称为相),每个线圈独立控制一个电机极性。两相步进电机通过交替激活这两个线圈来实现转动。具体来说,当一个线圈通电时,它会产生一个磁场,将电机转子吸引到对应位置;当另一个线圈通电时,前一个线圈的磁场会减弱,电机转子会被吸引到新的位置。通过交替激活两个线圈,可以实现步进电机的转动。
两相步进电机相对简单,结构紧凑,成本较低,广泛应用于一些低要求的应用领域。然而,由于只有两个线圈,步进角度较大,精度相对较低。
其他相数的步进电机,如三相、四相和五相步进电机,通过增加线圈的数量来提高步进角度的精度。随着相数的增加,步进电机的转动变得更加平滑和精确,但同时也增加了电机结构的复杂性和成本。
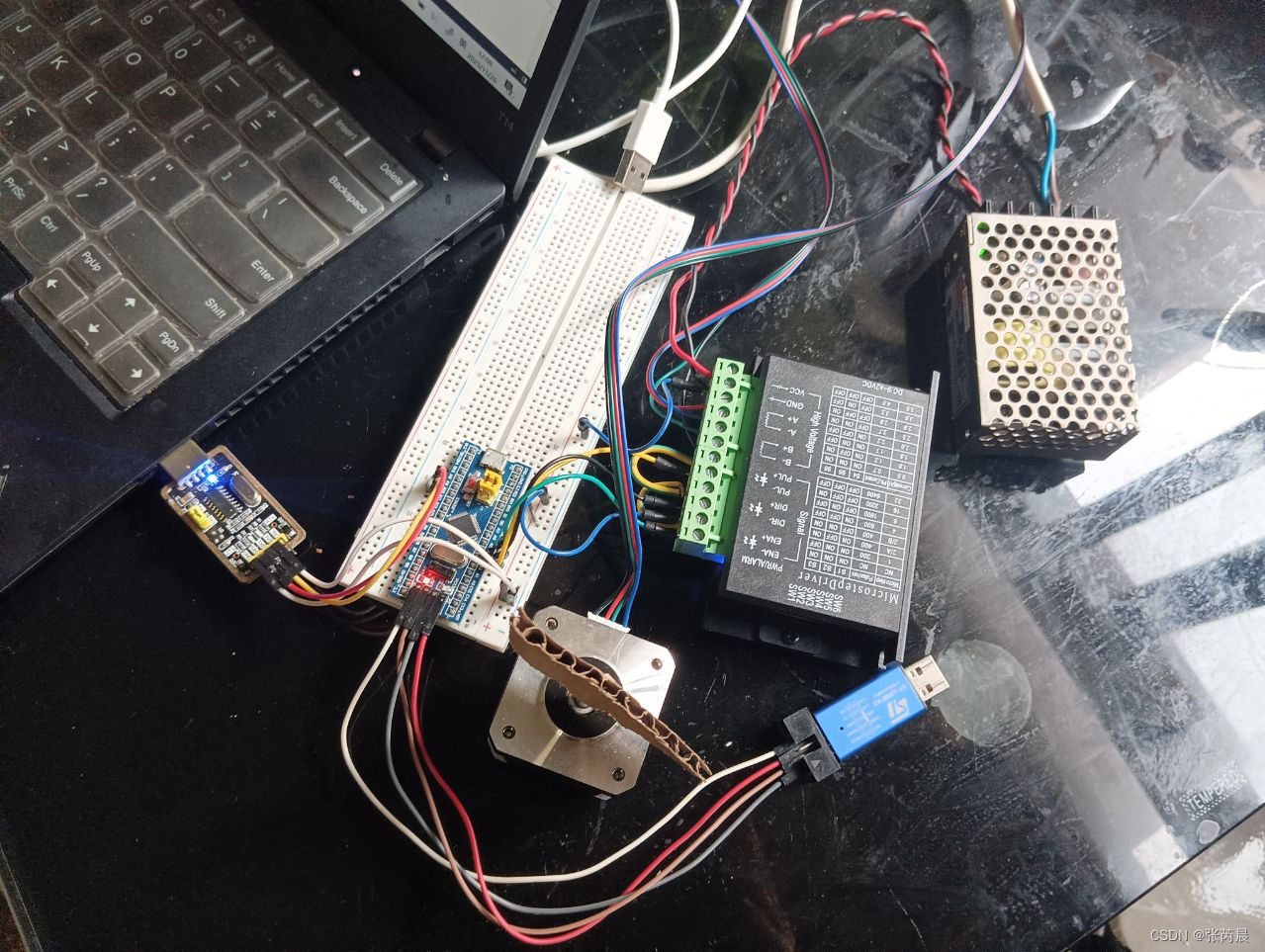
实物图:
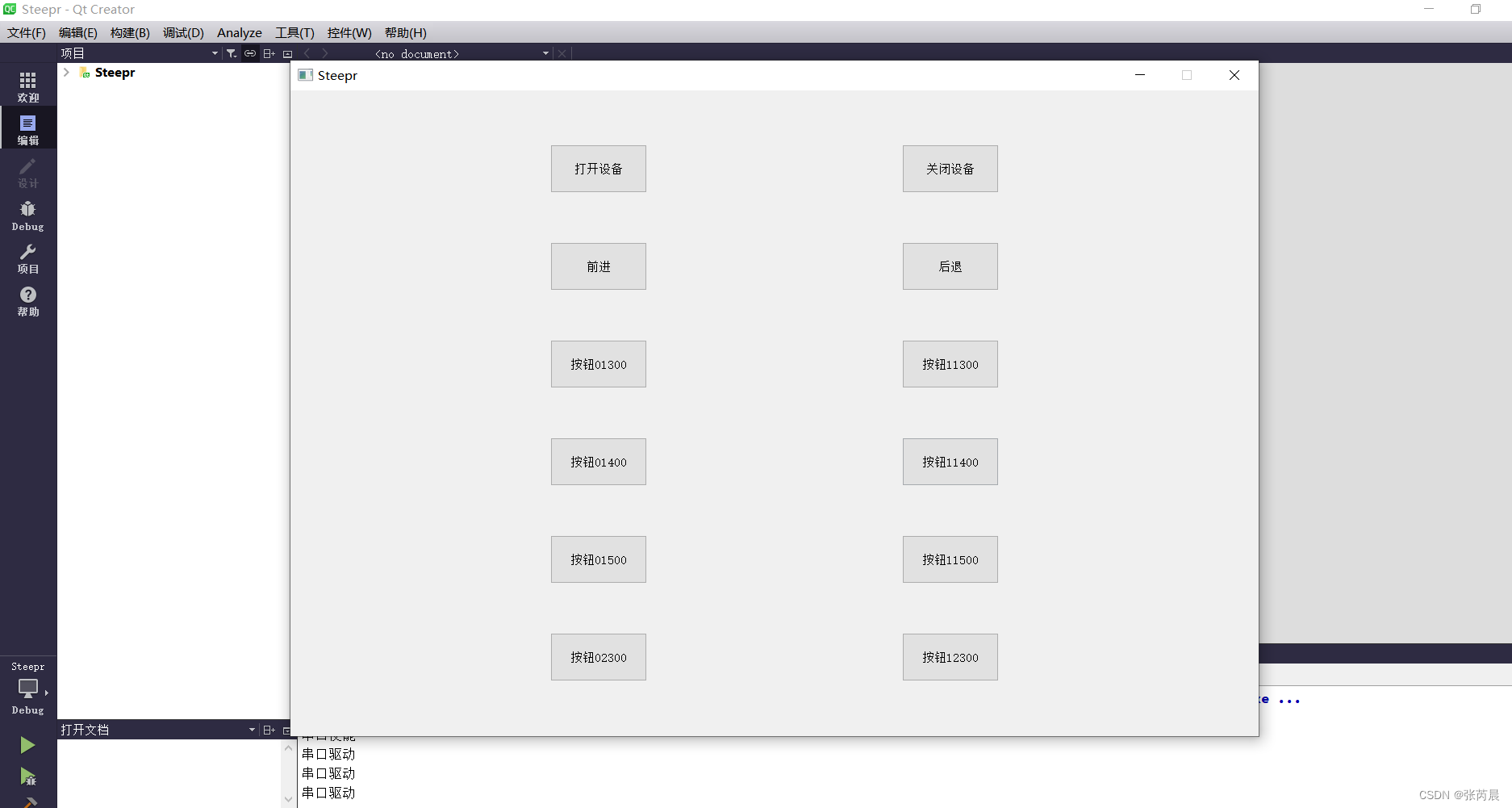
上位机Qt软件图:
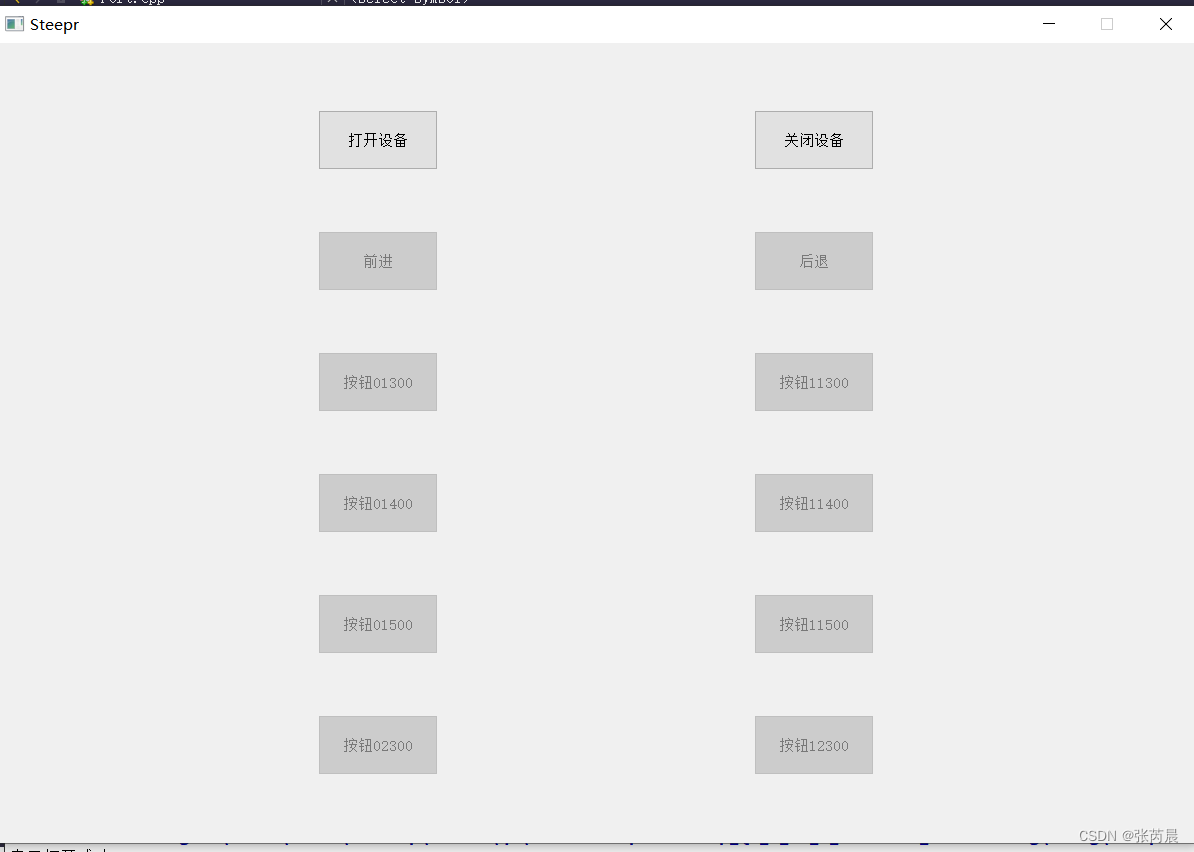
思路就是stm32一直给步进电机发脉冲,然后通过驱动器驱动步进电机转动,这个项目多了一个qt发送串口消息给stm32,stm32接收对应的命令然后执行不同的函数,但是这样无法实现步进电机的反馈,无法实现限位,回零等功能。
不过目前可以实现步进电机转动度数的控制,因为实物没负载也没测试有没有丢步的现象,还能实现正反转
stm32主要代码:
Motor.h:
#ifndef __MOTOR_H
#define __MOTOR_H
void Motor_Init(void);
void Motor_Run(uint32_t dir,uint32_t num,uint32_t speed);
void Motor_RunDegree(uint32_t dir,uint32_t degree,uint32_t speed);
#endif
Motor.cpp:
#include "stm32f10x.h"
#include "Delay.h"
void Motor_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//开启GPIOA的时钟
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_4 | GPIO_Pin_3; //PA5->EN;PA4->DIR;PA3->PWM
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA, GPIO_Pin_5 | GPIO_Pin_4| GPIO_Pin_3);
}
void Motor_Run(uint32_t dir,uint32_t num,uint32_t speed)
{
if(dir==1)
{
GPIO_SetBits(GPIOA, GPIO_Pin_4);
}
if(dir==0)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
}
for(uint32_t i=0;i<=(num*3200);i++)
{
Delay_us(speed);
GPIOA->ODR ^= GPIO_Pin_3;
}
}
void Motor_RunDegree(uint32_t dir,uint32_t degree,uint32_t speed)
{
if(dir==1)
{
GPIO_SetBits(GPIOA, GPIO_Pin_4);
}
if(dir==0)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_4);
}
for(uint32_t i=0;i<=degree;i++)
{
Delay_us(speed);
GPIOA->ODR ^= GPIO_Pin_3;
}
}
main.c:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Serial.h"
#include "string.h"
#include "Motor.h"
int main(void){
Serial_Init();
Motor_Init();
while (1)
{
if (Serial_RxFlag == 1){
if (strcmp(Serial_RxPacket, "1") == 0)
{
GPIO_SetBits(GPIOA, GPIO_Pin_5);
}
else if (strcmp(Serial_RxPacket, "3") == 0)
{
Motor_RunDegree(1,800,360);
}else if (strcmp(Serial_RxPacket, "4") == 0)
{
Motor_RunDegree(0,800,360);
}else if (strcmp(Serial_RxPacket, "5") == 0)
{
Motor_Run(1,1,300);
}else if (strcmp(Serial_RxPacket, "6") == 0)
{
Motor_Run(0,1,300);
}else if (strcmp(Serial_RxPacket, "7") == 0)
{
Motor_Run(1,1,400);
}else if (strcmp(Serial_RxPacket, "8") == 0)
{
Motor_Run(0,1,400);
}else if (strcmp(Serial_RxPacket, "9") == 0)
{
Motor_Run(1,1,500);
}else if (strcmp(Serial_RxPacket, "10") == 0)
{
Motor_Run(0,1,500);
}else if (strcmp(Serial_RxPacket, "11") == 0)
{
Motor_Run(1,2,300);
}else if (strcmp(Serial_RxPacket, "12") == 0)
{
Motor_Run(0,2,300);
}
else if (strcmp(Serial_RxPacket, "2") == 0)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_5);
}
Serial_RxFlag = 0;
}
}
}
Qt的主要代码:
#include "widget.h"
#include <QHBoxLayout>
#include <QVBoxLayout>
//角度实时波形显示
Widget::Widget(QWidget *parent)
: QWidget(parent)
{
portSteepr=new Port(this);
InitWidget();
InitSignalAndSlot();
ButtonDisabled();
}
Widget::~Widget(){
}
void Widget::InitWidget()
{
setFixedSize(QSize(1200,800));
LabelStatus=new QLabel(this);
LabelStatus->move(100,200);
PushButtonOpenDevice=new QPushButton(this);
PushButtonOpenDevice->setText(tr("open device"));
PushButtonOpenDevice->setFixedSize(120,60);
PushButtonCloseDevice=new QPushButton(this);
PushButtonCloseDevice->setText(tr("close device"));
PushButtonCloseDevice->setFixedSize(120,60);
PushButtonAdvance=new QPushButton(this);
PushButtonAdvance->setText(tr("advance"));
PushButtonAdvance->setFixedSize(120,60);
PushButtonBackOff=new QPushButton(this);
PushButtonBackOff->setText(tr("backoff"));
PushButtonBackOff->setFixedSize(120,60);
PushButton11300=new QPushButton(this);
PushButton11300->setText(tr("pushbutton11300"));
PushButton11300->setFixedSize(120,60);
PushButton01300=new QPushButton(this);
PushButton01300->setText(tr("pushbutton01300"));
PushButton01300->setFixedSize(120,60);
PushButton11400=new QPushButton(this);
PushButton11400->setText(tr("pushbutton11400"));
PushButton11400->setFixedSize(120,60);
PushButton01400=new QPushButton(this);
PushButton01400->setText(tr("pushbutton01400"));
PushButton01400->setFixedSize(120,60);
PushButton11500=new QPushButton(this);
PushButton11500->setText(tr("pushbutton11500"));
PushButton11500->setFixedSize(120,60);
PushButton01500=new QPushButton(this);
PushButton01500->setText(tr("pushbutton01500"));
PushButton01500->setFixedSize(120,60);
PushButton12300=new QPushButton(this);
PushButton12300->setText(tr("pushbutton12300"));
PushButton12300->setFixedSize(120,60);
PushButton02300=new QPushButton(this);
PushButton02300->setText(tr("pushbutton02300"));
PushButton02300->setFixedSize(120,60);
QVBoxLayout* vlayout1=new QVBoxLayout;
QHBoxLayout* hlayout1=new QHBoxLayout;
hlayout1->addWidget(PushButtonOpenDevice);
hlayout1->addWidget(PushButtonCloseDevice);
QHBoxLayout* hlayout2=new QHBoxLayout;
hlayout2->addWidget(PushButtonAdvance);
hlayout2->addWidget(PushButtonBackOff);
QHBoxLayout* hlayout3=new QHBoxLayout;
hlayout3->addWidget(PushButton01300);
hlayout3->addWidget(PushButton11300);
QHBoxLayout* hlayout4=new QHBoxLayout;
hlayout4->addWidget(PushButton01400);
hlayout4->addWidget(PushButton11400);
QHBoxLayout* hlayout5=new QHBoxLayout;
hlayout5->addWidget(PushButton01500);
hlayout5->addWidget(PushButton11500);
QHBoxLayout* hlayout6=new QHBoxLayout;
hlayout6->addWidget(PushButton02300);
hlayout6->addWidget(PushButton12300);
vlayout1->addLayout(hlayout1);
vlayout1->addLayout(hlayout2);
vlayout1->addLayout(hlayout3);
vlayout1->addLayout(hlayout4);
vlayout1->addLayout(hlayout5);
vlayout1->addLayout(hlayout6);
setLayout(vlayout1);
}
void Widget::InitSignalAndSlot()
{
connect(PushButtonOpenDevice,&QPushButton::clicked,this,&Widget::slotOpenDevice);
connect(PushButtonCloseDevice,&QPushButton::clicked,this,&Widget::slotCloseDevice);
connect(PushButtonAdvance,&QPushButton::clicked,this,&Widget::slotDriverSteeprAdvance);
connect(PushButtonBackOff,&QPushButton::clicked,this,&Widget::slotDriverSteeprBackOff);
connect(PushButton01300,&QPushButton::clicked,[=]{
portSteepr->DriverSteeprMotor01300();
});
connect(PushButton11300,&QPushButton::clicked,[=]{
portSteepr->DriverSteeprMotor11300();
});
connect(PushButton01400,&QPushButton::clicked,[=]{
portSteepr->DriverSteeprMotor01400();
});
connect(PushButton11400,&QPushButton::clicked,[=]{
portSteepr->DriverSteeprMotor11400();
});
connect(PushButton01500,&QPushButton::clicked,[=]{
portSteepr->DriverSteeprMotor01500();
});
connect(PushButton11500,&QPushButton::clicked,[=]{
portSteepr->DriverSteeprMotor11500();
});
connect(PushButton02300,&QPushButton::clicked,[=]{
ButtonDisabled();
portSteepr->DriverSteeprMotor02300();
ButtonEnabled();
});
connect(PushButton12300,&QPushButton::clicked,[=]{
portSteepr->DriverSteeprMotor12300();
});
}
void Widget::slotOpenDevice()
{
ButtonEnabled();
portSteepr->EnableSteepr();
}
void Widget::slotCloseDevice()
{
ButtonDisabled();
portSteepr->DisEnableSteepr();
}
void Widget::slotDriverSteeprAdvance()
{
portSteepr->DriverSteeprAdvance();
}
void Widget::slotDriverSteeprBackOff()
{
portSteepr->DriverSteeprBackOff();
}
void Widget::ButtonDisabled()
{
PushButtonAdvance->setEnabled(false);
PushButtonBackOff->setEnabled(false);
PushButton01300->setEnabled(false);
PushButton11300->setEnabled(false);
PushButton01400->setEnabled(false);
PushButton11400->setEnabled(false);
PushButton01500->setEnabled(false);
PushButton11500->setEnabled(false);
PushButton02300->setEnabled(false);
PushButton12300->setEnabled(false);
}
void Widget::ButtonEnabled()
{
PushButtonAdvance->setEnabled(true);
PushButtonBackOff->setEnabled(true);
PushButton01300->setEnabled(true);
PushButton11300->setEnabled(true);
PushButton01400->setEnabled(true);
PushButton11400->setEnabled(true);
PushButton01500->setEnabled(true);
PushButton11500->setEnabled(true);
PushButton02300->setEnabled(true);
PushButton12300->setEnabled(true);
}
然后是接线:
采用共阳极接线法:
PUL+ ENA+ DIR+接3.3V,ENA-接A5 DIR-接A4 PUL-接A3 然后USB转TTL接线 RX接A9 TX接A10
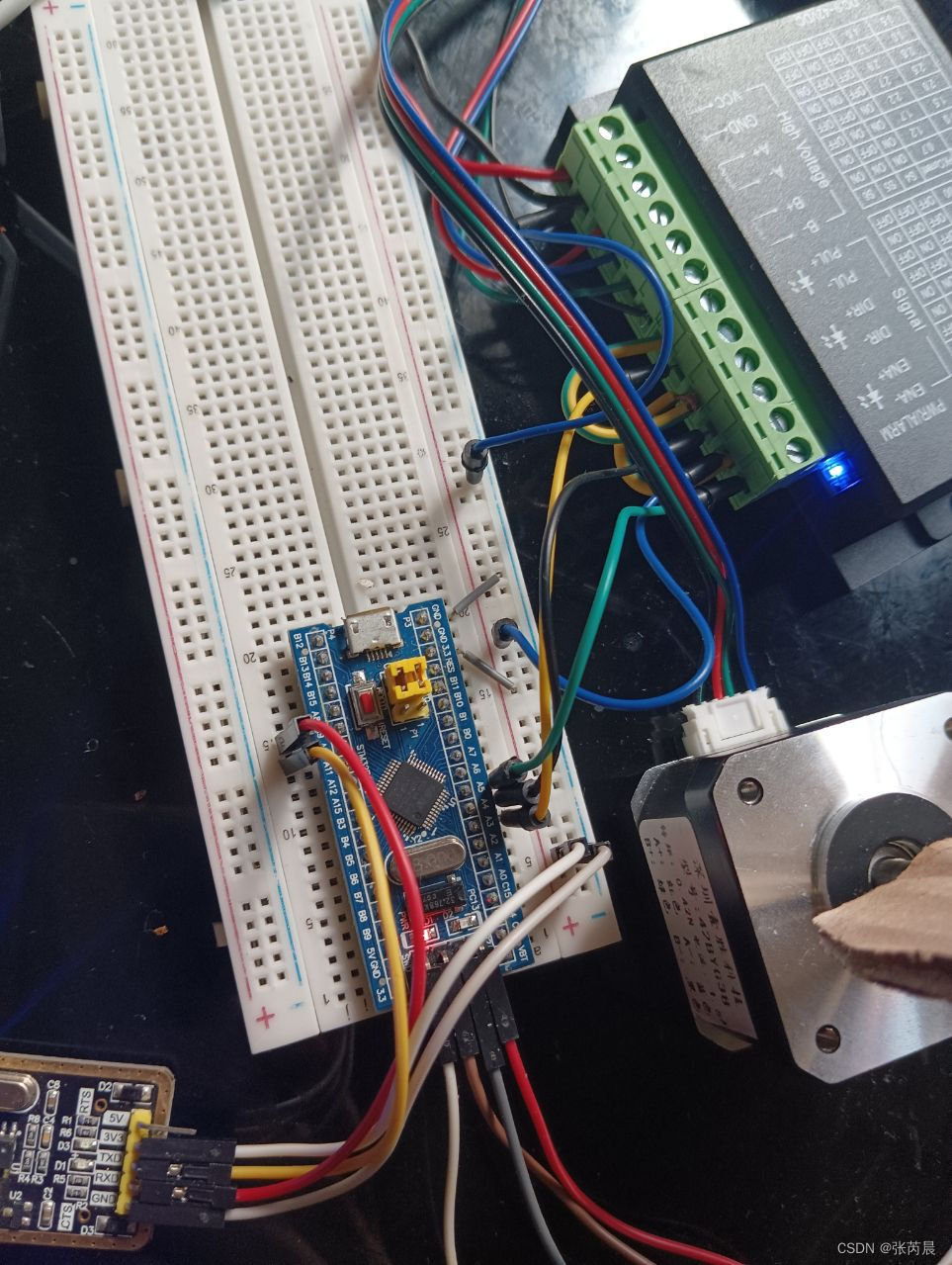
注意事项:
电机如果发热严重记得调节拨码开关的电流